ここから本文です。
Kyoto Robotics 株式会社(京都企業紹介)
知恵の経営、元気印、経営革新、チャレンジ・バイの各認定等を受けた府内中小企業を紹介するページです。


資本業務提携
(令和3年4月8日)
デパレタイズソリューション
(掲載日:令和2年5月19日 ものづくり振興課 木村)
村田機械株式会社と共同で導入された、パレットからの積み下ろし、保管棚への収納をワンステップで行うデパレタイズソリューションの動画です。
目と脳を持った知能ロボット
(掲載日:平成30年4月23日、聞き手・文:ものづくり振興課 足利)
Kyoto Robotics 株式会社(外部リンク)の澤田専務取締役にお話をおうかがいしました。
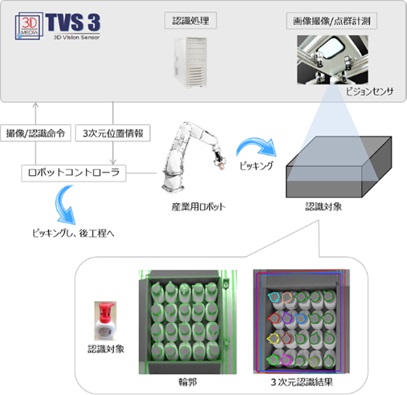
自律ピッキングをコントロールする3次元ロボットビジョンセンサ「TVS」
―まず、御社の概要を教えてください。
澤田) 2000年に設立、今年2018年1月1日に株式会社三次元メディアからKyoto Robotics 株式会社に社名変更しまして、現在約50名体制で、FA向け3次元ロボットビジョンセンサ「TVS」の開発販売に加え、新たに物流向けに知能ピッキングロボットの開発販売を開始しています。
―3次元ロボットビジョンセンサ「TVS」とはどんなものでしょうか?
澤田) ピッキングロボットの「目」と「脳」の役割を担うとでも言いましょうか、プログラムでピッキングロボットを動かすという従来のものではなく、ロボットが知能を持って自律的にピッキングを行うコントローラです。ワークの向きや重なり、掴むポイント、衝突しない取り出し経路など、人の代わりに判断するのです。


―今、こうした自律ロボットが本格的な到来を告げつつあると思うのですが、従来のFAで使われてきたような手法と比べると、どういった点が違うのでしょうか?
澤田) そうですねえ、例えば、振動やアタッチメントで整列させるパーツフィーダを用いる場合と異なり、ワークが傷つかない、大きなワークに対応できる、新品種追加や段取り替えが容易であるといった利点があります。また、2次元カメラと比べますと、バラ積み認識可能で荷姿を問わない、整列のための時間と装置が不要、高さ位置決めのための別センサが不要といった利点がありますね。
ライン稼働実績国内No1―使い慣れたロボットで、ワークの形状等にも依存せず、高速・精密に対応
―では、他の3次元認識と比べて、御社製品の差別化要素についてはいかがでしょうか?
澤田) 実績としまして、国内ラインでの稼働実績がNo1です。テスト件数だけでも、2011年から7年間で5千件を超えます。
―すごいですね。どうして御社にはそれが実現できたのですか?
澤田) 創業時からずっとやってきたということがありますが、まず1つは、主要ロボットメーカと連携済であるため、お客様の使い慣れたロボットの知能化が可能ということです。知能化されたロボットはお客様の使い慣れたロボットメーカのペンダントから制御することも可能ですし、ハンドも吸着、電磁石、チャックなど様々なものに対応しています。
―いいですね。
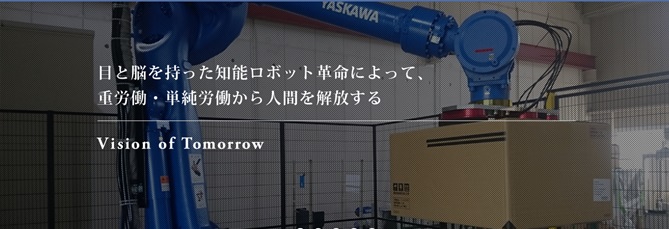
澤田) 次に2つ目としまして、ワークの形状や大きさに依存しないということです。例えば、メッキや研磨した表面反射の強い部品、表面状態が変わる部品、黒色や複合素材の部品、透明度のある樹脂部品、その他多種多様な部品で実績があります。また、10mm程度~1000mm程度の部品まで、様々なサイズの部品でも実績があります。さらには、1台のロボットに対し、最大4つのビジョンセンサを取付可能で、異なる通い箱の中の部品を見て・取り出し、投入先を見て・取り出した部品を取り付けるといったことや、ロボットやビジョンセンサに走行レーンを設けて稼働させた実績もありまして、適用力の広い環境構築が可能なのです。

―そうなのですね。
澤田) さらに、最新のTVS4.0では、撮像・計測、認識処理まで最速0.7秒という高速計測を実現し、高精度プロジェクタを採用することで、金属光沢や黒色ワークまで計測できるようになります。

3次元ビジョン
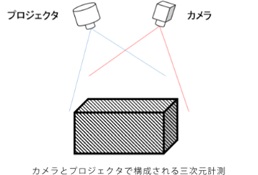
―3次元ビジョンとは、そもそもどういう原理なのでしょうか?
澤田) 3次元ビジョンには、3次元計測と3次元認識の2つがあります。3次元計測とは、対象物の長さや幅などの寸法を測ること、対象物の3次元形状を点群として計測することを指します。工場で使うロボットピッキングにおいては、光を鏡面反射する金属部品が対象である場合が多いです。安定した3次元認識には安定した3次元計測が必要であり、金属部品の3次元計測技術の確立が求められます。

―なるほど。
澤田) 一方、3次元認識とは、空間の中から特定の対象物を探索し、見つかった対象物の3次元位置姿勢を求めることを指します。未知パラメータは、3次元位置を表すX,Y,Z座標の3つと、3次元姿勢を表す3つのパラメータ(例:α,β,γ)の計6個です。つまり、1つの物体を3次元認識することは、この六次元空間の中の1点を探すことと等価です。探索空間の大きさは、次元数が指数に比例するので、3次元探索空間と六次元探索空間は非常に大きな差があります。例えば、どの次元も100でサンプリングするとすれば、2次元認識は100の3乗で百万点となり、3次元認識は100の6乗となり、1兆点となります
―そうなのですね。
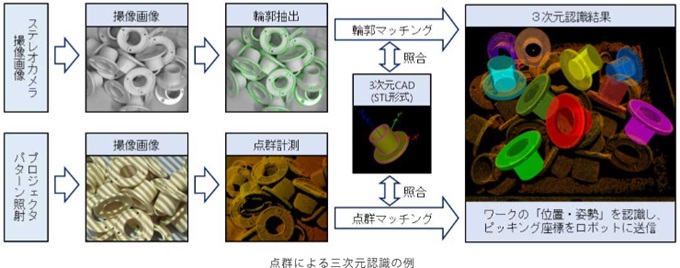
澤田) TVSはプロジェクタとカメラを備え、前途の輪郭と点群の両方を利用し、事前に登録された3次元モデルと照合することにより対象物の3次元認識を行います。登録された3次元モデルは、事前にそして認識された対象物の位置姿勢に基づき、ロボットの動作を最適に制御します。
物流全自動化を実現する知能ピッキングロボット
―よく分かりました。では、物流向けに知能ピッキングロボットについてはいかがでしょう。
澤田) 当社自身でロボットまで開発販売しているものです。当社が工場向けに開発してきた「目」と「脳」の技術をベースに物流におけるトータルソリューションを提供します。すなわち、まず、商品詰替え、ピースピッキングでは、多品種・少量の商品を自動判別し、単品で摘み取る作業が必要になります。完全自動化で、ピッキングミス・遅延を一掃し、検品作業を不要にすることができます。次に、最適な積付については、人が経験と勘によって行っていた積付作業を完全自動化します。荷崩れ防止と無駄のない配置を効率よく実現できます。ビジョンで見るので、検品作業を不要にすることができます。そして混載からデパレについては、混載された積荷を完全自動でデパレタイズします。寸法が既知のケースも、寸法が未知のケースも3次元認識します。

―どういった特長があるのでしょうか?
澤田) まず1つは、当社が新たに開発した最適積付アルゴリズムでは、できるかぎり多く積む、できるかぎり隙間なく積む、できるかぎり荷崩れしにくいように積む、高さ方向にできるだけ凸凹が出ないように積むといった、従来は作業者の経験と勘で行っていた積付を完全自動で実現します。

―なるほど。
澤田) また、日常品のピースピッキングでは、多種多様な形状の物品に対応する必要があります。当社の最先端技術により、CAD入力を不要とし一瞬にして終わるマスタ登録、適切な把持位置姿勢の自動推定及びピッキング、不定形であるパウチの3次元認識と把持位置姿勢の自動推定を実現しました。
―いいですね。では、最後に今後の展望を少し教えてください。
澤田) この、目と脳を持った知能ロボットにより、労働人口減少問題を解消し、重労働・単純労働から人間を解放するという社会的ミッションを果たすべく、ニーズ調査・技術開発・ソリューション開発・市場開拓を進めてまいります。
同社の今後に目が離せません!
お問い合わせ