ここから本文です。
Rapyuta Robotics株式会社(京都企業紹介)
知恵の経営、元気印、経営革新、チャレンジ・バイの各認定等を受けた府内中小企業を紹介するページです。



ロボットとロボット開発のためのオープンエコシステム「rapyuta io」
(掲載日:令和元年12月19日、聞き手・文:ものづくり振興課 足利)
Rapyuta Robotics 株式会社(外部リンク)(本社:東京、けいはんなオープンインベーションセンター(外部リンク)入居)のモーハナラージャー ガジャン代表取締役CEOにお話をおうかがいしました。
クラウドロボティクス・プラットフォーム「rapyuta.io」
--いつもお世話になっております。改めまして、御社の概要からご紹介ください。
CEO)2014年創業、現在従業員約50名で、クラウドロボティクス・プラットフォーム「rapyuta.io」の提供を行っています。
--「rayuta.io」についても改めてご紹介を。
CEO)自律移動ロボット(AMR)、ロボットアーム、無人フォークリフトなど異なる種類のロボットをクラウドから、一括管理して協調作業を実現したり、アプリケーションを配布したりといったことを可能にするプラットフォームです。日本マイクロソフト株式会社とも技術協力し、マイクロソフトのクラウドプラットフォームMicrosoft Azure上で動作する世界初のエンタープライズ品質のクラウドロボティクス・プラットフォームです。

--具体的な機能は?
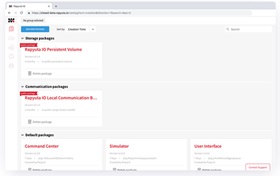
CEO)ロボットをクラウドから管理する機能、異種ロボット間でのメッセージング、異種ロボット間で同じアプリケーションを動作させるためにコンパイルなどを行う機能、配布するアプリケーションを登録する機能、ドラッグ&ドロップでロボティクス向けアプリケーションを開発できる機能等があります。
「シェアリング事業」も活用し、異種ロボットどうしの協調作業を実現!
--「協調作業」に関して言えば、先般の「けいはんなロボット技術フォーラム」においても、T-ROBOさんと合同でrayuta.ioを使って異種のロボットが協調作業を行う「コネクテッドロボットシステム」を披露いただきましたね。
CEO)はい、様々なロボットが接続できる基盤づくりを、ということで京都府、京都産業21の「シェアリング事業(中小企業共同型ものづくり支援事業)」補助金をT-ROBOさんと一緒に活用させていただき、行いました。また、一般的に「クラウドロボティクス」というと、ロボットの頭脳をクラウドにつないで賢くするアプローチのことですが、rapyuta.ioはもう一歩、踏み込んでいます。例えば、ロボットを抽象化し、あたかも仮想マシンのようにクラウドから管理して、リモートでメンテナンスやパフォーマンス監視を行うことで、各ロボットの位置等によって自動でタスクを振り分けるといった仕組みを作ることが可能となります。あるいは、「画像認識AIで物体を把握してロボットアームでつかむ」といったような産業用ロボットでよく使われる機能が、あらかじめコンポーネントとして用意されています。

けいはんなロボット技術フォーラムでのデモンストレーション
--たしか、日本郵便さんの関連でも、ロボットアームとカゴ車自律走行ロボットの協調作業をなさってましたね。
CEO)はい。オープンイノベーションプログラム「POST LOGITECH INNOVATION PROGRAM 2018」の成果発表会で最優秀賞をいただきました。郵便局内において「カゴ台車から荷物を小包区分機の供給ラインに取り降ろす」作業をロボットアームにより自動化するものです。また、上記の工程に加え、その前工程である「トラックから取り降ろしたカゴ台車を各作業場所に運搬する」工程においても、rapyuta.ioプラットフォームを活用し無人搬送車(AGV)とロボットアームが協調するシステムの実用化に向けて実証実験を重ねてきました。


ティーチングレスで自律移動!協働型ピッキングロボット
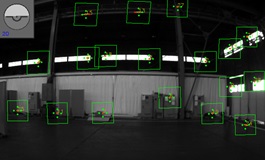
--けいはんなロボット技術センターでは環境側センサのモデル的な意味も込めてモーションキャプチャーを備えていますが、アームロボットでもモーションプランニング等のために環境側ビジョンセンサも活用する例もありますし、ロボット側、環境側含めて様々なものが関わってきていますね。
CEO)柔軟性・堅牢性・拡張性・動的環境への対応といった要求を満たすためには、複数の手法を組み合わせることによって解決するしかないのではないでしょうか。その際に、ロボット搭載センサ、環境側センサなどを統合し、堅牢性・柔軟性・動的環境へ対処するのに、クラウドを利用するというのが「Rayuta.io」です。

--これにより、御社が開発された協働型ピッキングロボットは、ティーチングも不要なんですよね。
CEO)はい。倉庫内の部材や商品を取りに行って、そこにいる担当者に渡したり、逆に受け取ったりするのですが、Rayuta.ioに部材や商品の場所が登録されているので、いちいち経路をティーチングする必要なく自律で経路を判断して動きますし、他のロボットや人の動きにリアルタイムに連動して経路変更します。

(「国際ロボット展2019」にて)
アプリケーション開発スピードもアップ!
--たいてい、何らかのティーチングを行いますので、ティーチングレスというのはすごいですね。
CEO)画像認識AIで荷物の形状を認識してつかむロボットアーム用のアプリケーションの開発もapyuta.io上で行われていますが、rapyuta.ioが用意しているコンポーネントを活用したことで、約3カ月という短期間でアプリケーションができています。
--素晴らしいですね。
CEO)よく例え話で言うのですが、今のロボットは、ガラケー時代のケータイと同じで、各社がハードウェアを独自設計し、その機種でしか動かない専用アプリがインストールされていたのに似ています。しかし、スマートフォンのように、マーケットプレイスから各社が開発したアプリケーションをインストールでき、異なるメーカーの機種であってもアプリケーションが共通して動く世界を実現したいのです。
「四方よし」を実現!
--rapyuta.ioを推し進められる理由はどういったことがあるのでしょうか?
CEO)「エンドユーザー」、そこにロボットシステムを導入する「システムインテグレーター」、ロボットシステムを構成する「ロボット(ハードウェア)開発者」「ソフトウェア開発者」が、みんなそれぞれ課題を抱えています。エンドユーザーは、人手不足でロボット導入したいが、極力低コストで導入したい。
--そうですね。
CEO)システムインテグレーターは、エンドユーザーごとに異なる様々な機器を取り扱う必要があるが、各機器、各システムに関するハードウェア、ソフトウェアの専門知識はどうしても不足しがち。また、ロボット開発者は、ソフトウェアの専門知識が不足しがちであったり、ハードウェアの管理コストが課題となっている。ソフトウェア開発者は逆に、ハードウェアとクラウドの専門知識が不足しがちであったり、ソフトウェアの実行環境整備コストが課題となっている。こうした課題を持つ4者に対して、そうした複雑さを抽象化したプラットフォームrapyuta.ioにより解決をサポートしようというものです。
--ガジャンさんはどこで学んで来られたのですか?
CEO)東京工業大学にて学士・修士(工学)を取得後、アインシュタインも学んだチューリッヒ工科大学(ETH Zurich)にて博士(工学)を取得しました。当社はETH Zurichの認定スピンオフ企業です。日本市場でのロボット推進を目指して、日本を本拠にしています。
--今後の展望についてはいかがでしょう。
CEO)Rapyuta Roboticsのゴールは、ロボットを誰にとっても便利で身近な存在にすることです。私たちは、オープンエコシステムによるアプローチが、このゴールに近づくための最適な手段であると考え、オープンで他者との協業が可能なプラットフォームを提供してまいります。
今後の一層の発展が楽しみですね!
お問い合わせ