ここから本文です。
知の京都- 石井カルロス寿憲さん(株式会社国際電気通信基礎技術研究所 石黒浩特別研究所 音環境知能研究グループ グループリーダ)
産学公連携、産業振興の一環として、京の研究者・専門家の皆さんを紹介するページです。

音環境知能技術による人とロボットのインタラクション向上
(掲載日:令和元年6月20日、聞き手・文:ものづくり振興課 足利)

株式会社国際電気通信基礎技術研究所 石黒浩特別研究所 音環境知能研究グループの石井カルロス寿憲さんのお話をおうかがいしました。
位置情報と音情報の組み合わせ
―どういった研究をなさってるのですか?
石井) 今、取り組んでいる研究課題の一つは、音環境知能技術の研究開発です。私たちの暮らしの中では、雑音を含めて様々な音がしていますが、そうした環境の中で、誰が、いつ、どこで、どう発話したかを掴もうということですね。
―難しそうですね。
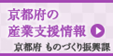
石井) 具体的には、位置情報と、音情報の組み合わせにより実現します。こちらのパソコンの画面をご覧ください。これはこの部屋のマップです。今動いているのが足利さんです。この部屋の中に、レーザー測距センサーが5つあります。

―あっ、レーザーセンサーありますね、気づきませんでした。
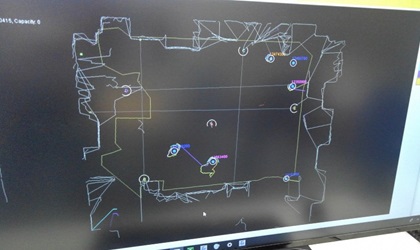
石井) そしてもう1つ、こちらの画面をご覧ください。ひし形に並んでいる4つの白い丸が音声センサーとなるマイクロフォン・アレイです。これによりどの方向から音が聞こえてきているかを示しています。
―えっ?音声センサーはどれですか?
石井) 机の上に2つ、このオブジェのようなものと、天井に2つ、あります。


―おお!これですか。パソコンの画面に戻りますと、これらのセンサーに、どの方向から音声が届いているかが、線で表示されているというわけですか。じゃあ、今のこの線は、周囲でパソコンのキーボードを打ってらっしゃる音などですね。
石井) そうです。そして、複数のセンサーに差し込む線が重なるところに、音源があることが分かって、そこに人がいれば、その人がしゃべっているということが分かるのです。二重丸の中に数字が入っているのは、人でして、1番は私、2番は足利さんです。しゃべると線が重なるところにある二重丸が赤くなります。
―そうなのですか。あっ、今も赤く光りましたね!
石井) そして、このヘッドフォンを装着してください。例えば、パソコンの操作で、多少雑音は残りますが、私の声だけを聞こえるようにすることも、簡単にできます。あるいは、切り替えて、足利さんの声だけを、ということも簡単にできます。
―うわっ、ほんとですね!すごい!非常に面白いですが、こういった研究は他にもされてる方はいるのですか?
石井) マイクロフォン・アレイ単体に関する研究は多いですが、複数のマイクロフォン・アレイと位置情報との組み合わせには、我々の独自の技術が含まれています。部屋の中を移動しても、人の位置が追跡されますので、それぞれの人の発話を精度よく検知できるのです。
環境センサーネットワークでロボットが聞くべき音声を抽出
―どういう分野で活用が期待されるのでしょうか?
石井) きっかけは、ロボットの音声認識でして、日常の中には雑音が多くて、なかなか難しいのです。そこで、ロボットが聞くべき音声を抽出する技術が有効なのです。その際にロボット単体ではなく、環境センサーを組み合わせた方が効果的なのです。
―なるほど!けいはんなロボット技術センターのコンセプトの一つも、環境側のセンサーの活用があり、大変興味深いです。
石井) こちらにロボットがいます。お座りになって話しかけてみて下さい。

(ERICA:ERATO 石黒共生ヒューマンロボットインタラクションプロジェクト)
―そうですか、では。・・・。あっ、話しかけたら、目を合わせてくれたり、目をそらされたり、おお、すごいですね。
石井) 周囲にカメラや音声センサ―がいくつか設置してあります。これにより、周囲に複数の人が居ても、誰の話を聞くか、誰に顔を向けるか、ロボットが判断する材料が得られます。

―どういった音声、誰の音声を選択するかは、別にロジックが必要なのですよね?
石井) はい、誰の話を聞くかを判断するには、別のロジックは必要です。簡単な例では、発話中または発話の直後にロボットに顔を向けている人とか、ロボットの近くの人とか、いろいろあり得ますね。
―なるほど。他にはどういった利用が考えられますか。映画等の撮影でも応用できそうですが。
石井) そうですね。会議で誰がどう話したかなども、把握できますね。今、聴覚障害を持つ方の補聴機能を支援するプロトタイプに取り組んでいます。さきほど、ヘッドフォンで、聞きたい音だけを聞けるという体験をしていただきましたが、こうした注意指向・取捨選択型聴覚支援のシステム、さらには、周囲の人が持っているスマホ等を二次利用することによって、健聴者なみの聴力が得られる方法を実現したいと考えています。
人のように接することができるロボットを
―素晴らしいですね。石井さんは、いつからこうした音声認識の研究をなさってるのですか?
石井) 私はブラジル生まれの日系三世で、博士課程から日本に来たのですが、ブラジルの大学の卒論で、既に音声認識に関する研究を始めていました。
―そうなのですね。
石井) こちらに来てからも、例えば、パラ言語認識の研究をしています。通常の音声認識ではテキスト情報を受け取りますが、実際には、人は言い方によって伝えたい意図や態度や感情を変えていますよね。そうしたものを総称してパラ言語と言います。例えば、同じ「えっ」でも、驚いた時の「えっ」、がっかりした時の「えっ」、聞きづらかったときの「えっ」など、様々ですよね。
―なるほど。
石井) あるいは、ロボットの動きの生成についても研究しています。ERICAのようにロボットの姿かたちが人と似てくればくるほど、音声や応対の動きなども、人間に似せていかないと、違和感が出てきます。例えば口の動き、頭の傾きをどうするか、どう絶妙のタイミングで笑顔にするか、話すときの自然なジェスチャーをどうするかなど、いろいろありますよね。
―今後の展望はいかがでしょう。
石井) まず、お話ししました研究のクオリティを高めていくことですね。そして、人とロボットのインタラクションを高めていきたいです。今はまだ、人と人のようなインタラクションとは程遠いです。それを少しでも埋め、人のように接することができるインタラクションを実現したいです。
―その実現はいつ頃になりそうですか?
石井) うーん。10年!いや、5年かな?!頑張ります!
大変楽しみです!
お問い合わせ